-

Kitronik FM Radio Kit V2.0
$15.23 -
Kitronik FM Radio Kit V2.0
$20.00




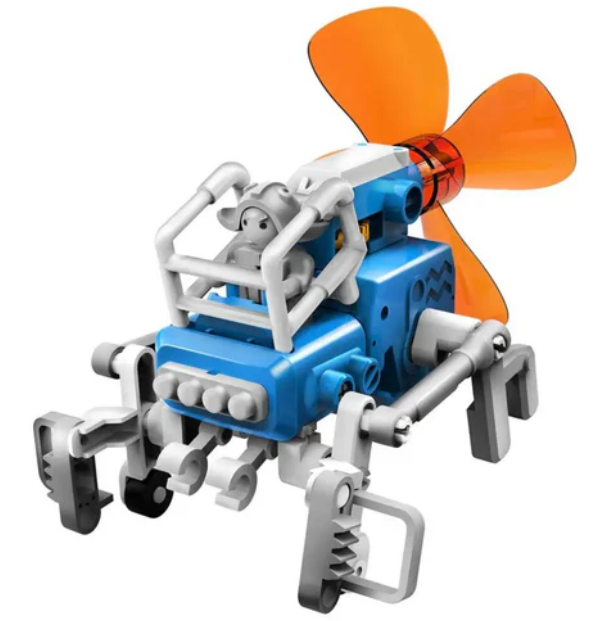
Tamiya bipedal walking robot
Imitate real walking movements
Customizable through additional components to achieve a unique appearance
Continuous operation for about two hours
Direction can be changed by adjusting the gearbox and limiter
Tamiya bipedal walking robot is the latest member of the educational architecture series. The design purpose of this robot is to mimic walking motion by transferring weight from one side to the other. The weight transfer unit consists of a gearbox and a battery box, which moves from right to left, causing the model to shake and its legs to move forward.
The robot has dimensions of 85mm in length, 132mm in width, and 107mm in height. After installing the guide rod, it can be extended up to 138mm. The weight of the robot is approximately 138g (including battery). Two AAA batteries are required (not included with the product). The robot can run continuously for about two hours.
The gear ratio of the robot is 114.7:1, equipped with a low-speed 130 type motor. The speed of the robot is about 4.8 centimeters per second or 170 meters per hour, which means it can cover a distance of 1 meter in about 20 seconds. It is recommended to operate the robot on flat ground for optimal performance.
The robot is composed of light gray plastic components. The leg and plastic slide rails are designed with holes that can be connected to other components such as universal shafts, arms, and other original parts using self tapping screws. This allows customization of the appearance of the robot. The assembly of the robot is very simple, using a buckle/screw connection design. The assembly difficulty level is 3 out of 5, and the estimated assembly time is 120 to 180 minutes.
The movement of robots is achieved by converting crank rotation into reciprocating motion through sliders. The direction of the robot can be changed by adjusting the installation angle of the gearbox and the limiter. The installation angle of the gearbox can be adjusted to three directions - right, center, and left - and can be changed even after assembly.
The legs of the robot are equipped with limiters to control the inclination of the model. When the limiter is lowered, the body inclination will decrease and the stride will become shorter. If encountering obstacles, guide rods can be installed to change the direction of the robot. The center of gravity of the robot can be changed by having it grip objects such as AAA batteries, allowing the robot to rotate.
It is recommended to operate the robot on flat ground for optimal performance. Adjusting the angle of the gearbox connection and the limiter can change the direction of the robot. By having the robot grip an object, the center of gravity of the robot can be changed, allowing the robot to rotate.
Related products